-

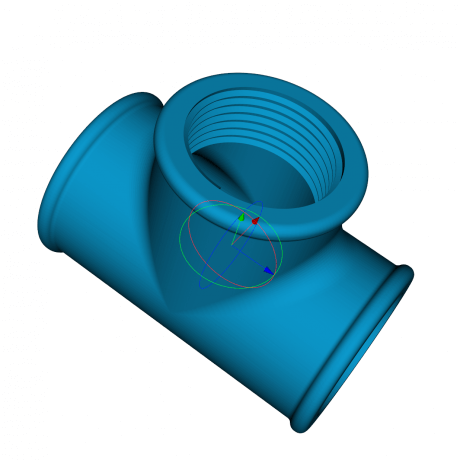
Insert CAD model
-
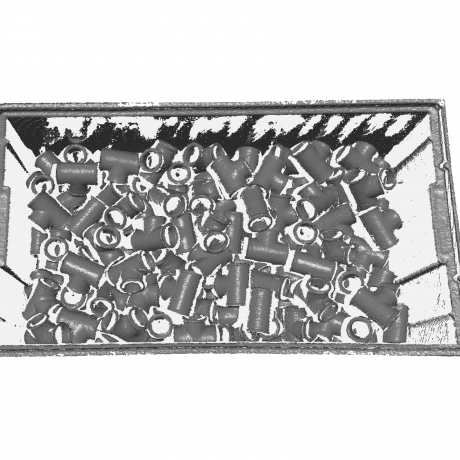
Capture 3D scene
by PhoXi 3D Scanners -

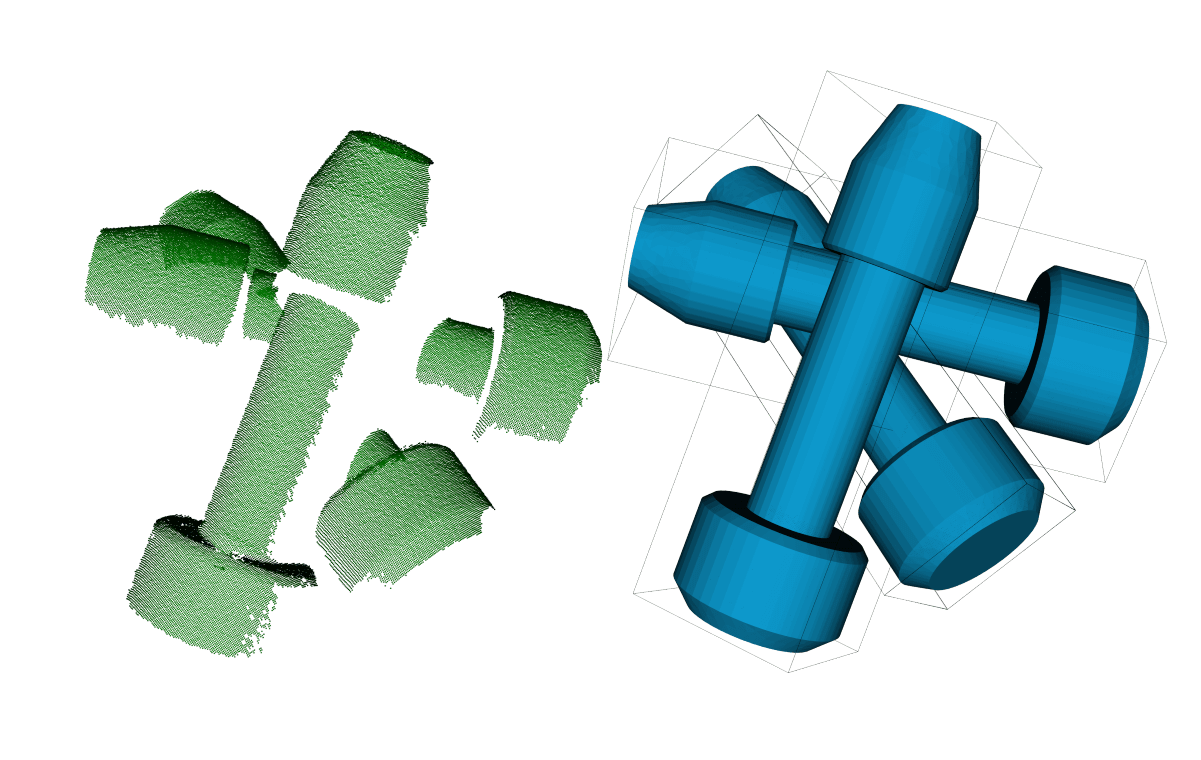
Get localized results
应用程序
Object recognition
Benefit from working in real 3D world and solve problems where 2D techniques fail. Localization SDK recognizes black object on black conveyor, distinguishes object miniature from its real version and finds also partially hidden objects.
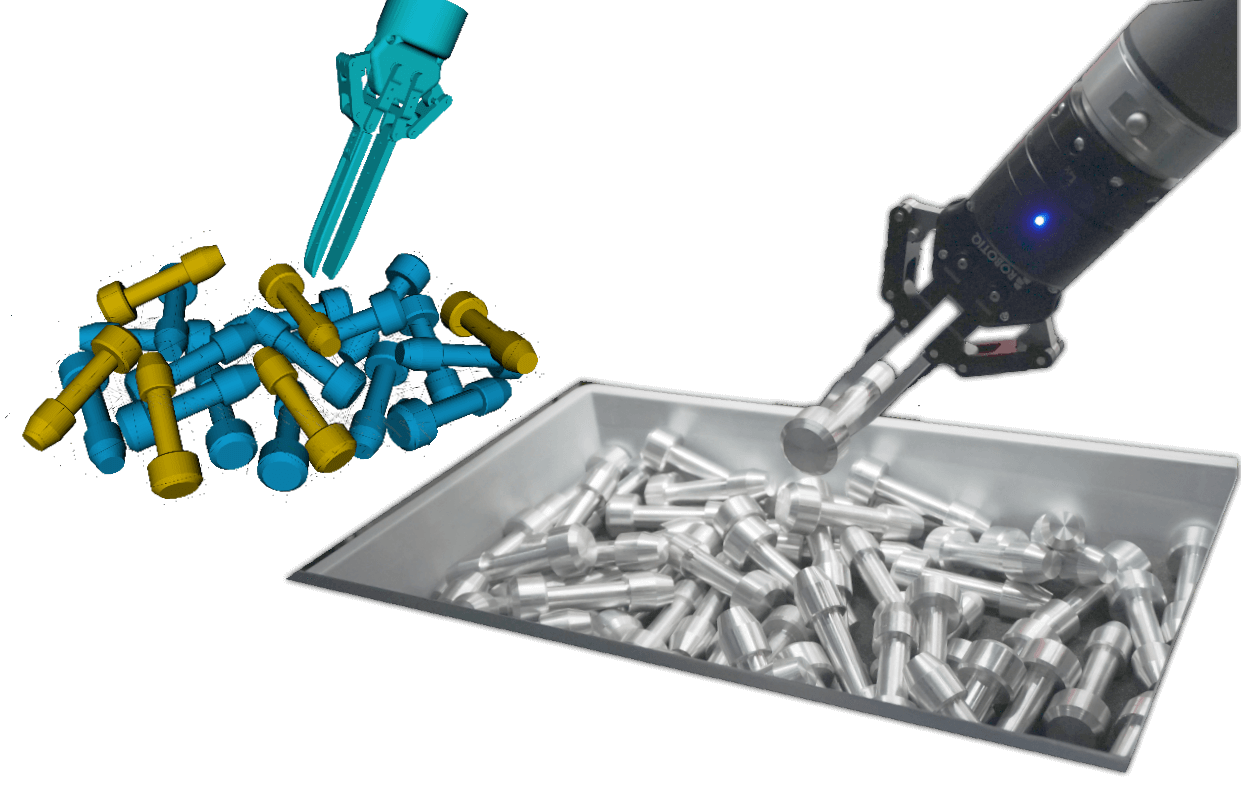
箱柜取放
To successfully grab the right object from the unorganized set, it is necessary to choose part accessible by gripper. Advanced parallel localization can quickly find multiple object instances and select the ones that are most suitable to pick.
Object placment
Searching for the object and the “negation of object” are two sides of the same coin. Therefore it is plausible to use the SDK for finding the correct spot for object placement, being it on top of the other object or in a form.
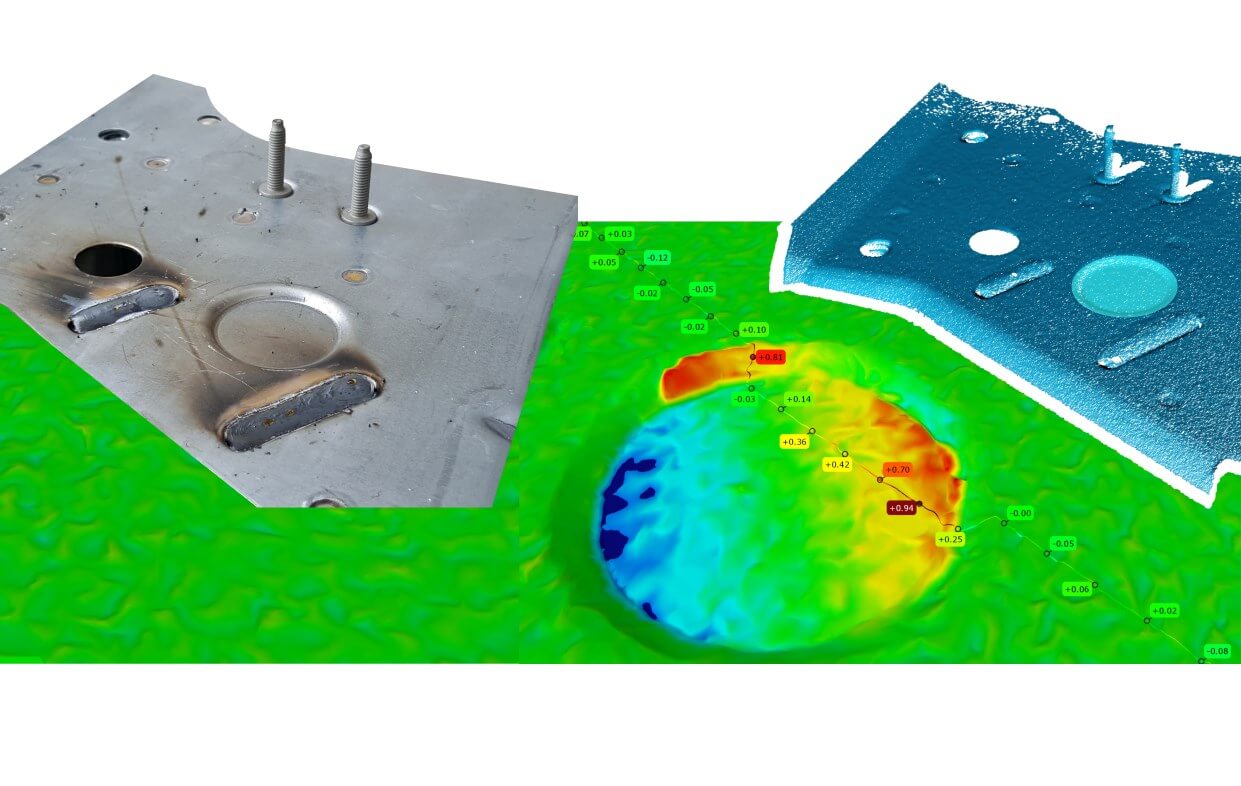
Inspection and analysis
Output from the 3D localization library can be further used to measure mutual distance and alignment of multiple objects, compared to the CAD for quality inspection, parts configuration, or foam, glue or welding thickness analysis.
Implementations
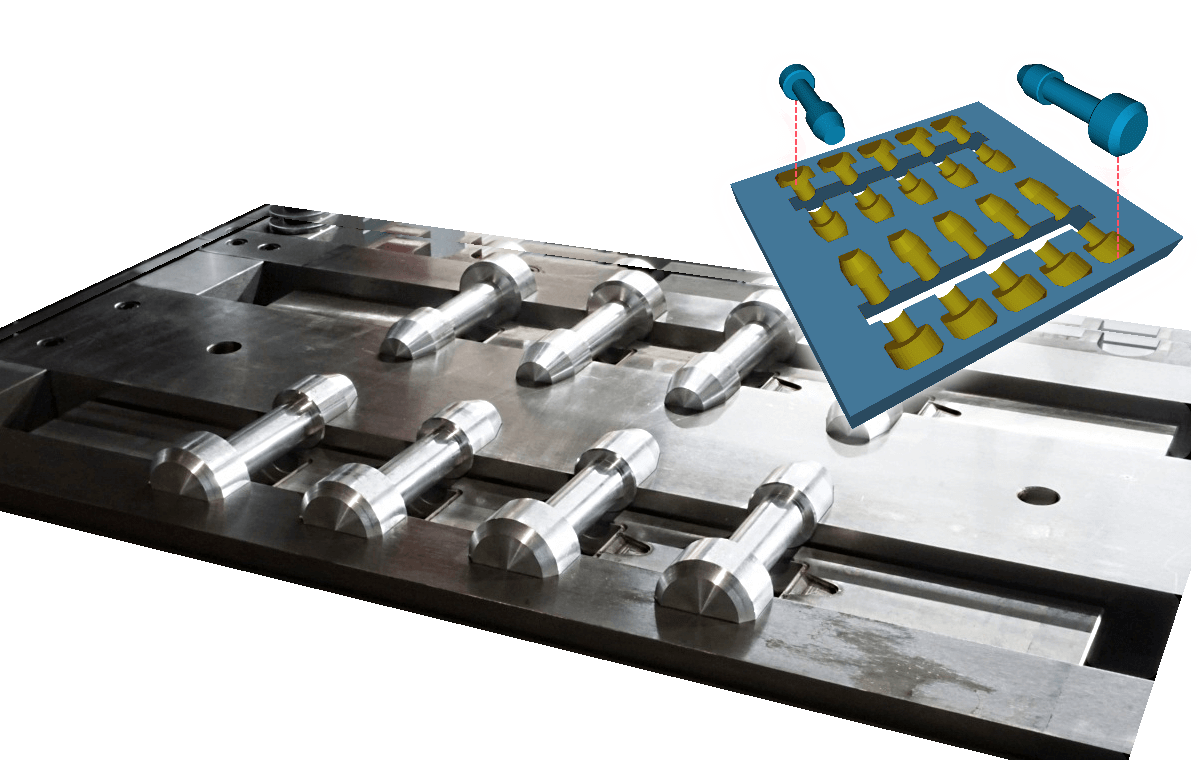
箱柜取放
Randomly placed parts are scanned by PhoXi 3D Scanner M. Localization SDK finds exact parts positions and selects the one that can be gripped. Universal Robot 5 picks selected part avoiding collision and place it into the form for injection molding. Partner: ROMI Industrial Systems. More about bin picking特征
-
Simple to use graphical user interface for configuration of localization process
-
Robust detection and localization of occluded parts with respect to potentional gripping point
-
Parallel, simultaneous localization of multiple instances, asynchronous results stream
3D Localization
Test Localization SDK or explore complete localization solutions.