Locator Studio – the new tool for simple 3D picking applications
Do you need to automate such a simple task as picking oriented or semi-oriented objects from flat surfaces?
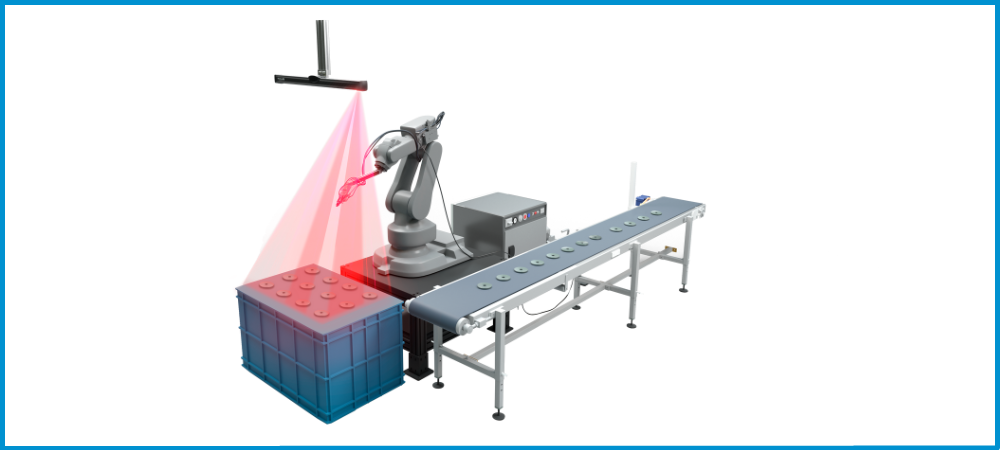
For this, you do not need a complex bin picking solution with advanced path planning and algorithms for collision avoidance. If you need to pick items from flat surfaces where there is no risk of the robot colliding with high bin walls or randomly placed parts inside, you will do with a simple solution relying on state-of-the-art 3D vision. This brings many benefits, including faster picking speed, easier calibration and configuration, and lower demand on your skill set. Let’s have a closer look at this with Jozef Veres, Sales Director of Automation at Photoneo, and Patrik Bakyta, Product Specialist for Bin Picking Solutions.
Automated bin picking is considered one of the toughest technological challenges due to the complexities involved. Often, it is referred to as the “holy grail in sight”. We have dedicated much of our research to develop a robust robotic intelligence tool that can help you master the most challenging bin picking applications – the Bin Picking Studio.
Yet, there are applications where such complex and highly sophisticated bin picking solutions are not necessary and you will do with a simple system that can be operated with entry-level skills.
While there is a pretty high number of complex software solutions for challenging bin picking applications, a simple system for fast object localization and collision-free picking was missing. Because of this, we developed a 3D picking tool that targets simple applications – the Locator Studio.
While this new tool works on well-known and proven principles of conventional technologies, its simplicity brings you many new benefits, including faster speed than bin picking solutions, easier calibration, configuration, and operation, and no need for a special skill set.
Here is a summary of the main benefits of Locator Studio:
- Simple & fast 3D picking in collision-free environments
- Fast scanning speed & superior quality of 3D point clouds provided by the PhoXi 3D Scanner or MotionCam-3D, which can be fixed mounted above the scene or attached to the robotic arm
- Easy calibration and configuration via the web interface
- Robust CAD-based object localization from a single scan while the robot picks the previous round of parts
- Fast integration with an arbitrary robot system thanks to the TCP/IP protocol
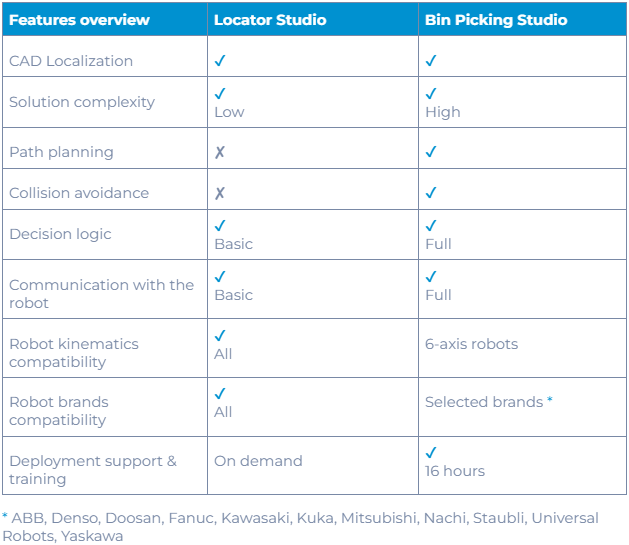
For a better understanding of the differences between our advanced Bin Picking Studio and simple Locator Studio, have a look at the table in the next section.
Comparison of Locator Studio and Bin Picking Studio
Applications – when & where to use Locator Studio
Locator Studio upgrades 2D and 2,5D applications so it can assist you with any type of task that requires the picking of oriented or semi-oriented objects from collision-free environments. These may represent flat surfaces where there is no risk of collision such as trays, blisters, shallow bins, stop-and-go conveyor belts, or racks. Other types of applications include simple delayering, destacking, deracking, or the localization of parts for assembly, screwing, and precise object placement.
Locator Studio can be used with both PhoXi 3D Scanner and MotionCam-3D. Based on your preferences and application requirements, you can calibrate the vision device for a static or hand-eye setup. A great advantage is that the system can define the direction or vector of picking by default so the parts are being picked in a sequentially selected order or direction without the need for additional arrangement.
Technical compatibility
Locator Studio communicates with all devices via a TCP/IP protocol so all you need is Ethernet. Because the protocol is open and thoroughly documented, you can integrate any robotic brand or industrial manipulator, which makes Locator Studio a true all-rounder.
The TCP/IP interface enables the communication between the Vision Controller and Robot Controller via any middleman, including an arbitrary robotic controller, PC with custom setups, or PLC. This is a new feature – the previous topology was to connect a scanner with the Vision Controller and the Vision Controller to Robot Controller.
While Bin Picking Studio supports only robots with 6-axis kinematics, Locator Studio has no such limitations. The tool is more flexible and universal and can be used with robots that have various degrees of freedom and kinematics, for instance SCARA, DELTA, or palletization robots and 7-axis systems.
How it works
Similarly to Bin Picking Studio, Locator Studio also supports two types of calibration:
1.) Extrinsic calibration with the scanner mounted in a fixed, stationary position in the robotic cell, usually above the bin
2.) Hand-eye calibration with the scanner mounted directly onto the robotic arm.
Extrinsic calibration is done with a suitable ball of a known diameter attached to the endpoint of the robotic arm or to the gripper. Hand-eye calibration is done with a calibration board with a marker pattern.
The calibration process consists of adding several calibration points during which the robot stays in a unique pose and the scanner can see the calibration ball/board. The calibration points can be added by the operator through Locator Studio’s web GUI. It is also necessary to provide the current TCP of the robot in each robot pose. If you choose semi-automatic calibration, the robot adds the points itself by calling a dedicated robot request that also provides TCP data.
After adding the required number of points, the calibration accuracy and calibration matrix are computed and saved in the vision system.
After successful calibration, you can start picking objects.
The robot requests information about the objects’ location and position. Following this request, the vision system makes a scan, which is immediately processed as a point cloud directly in the Vision Controller. Here runs CAD localization and the position and rotation of each object is sent through Ethernet in the form of X, Y, and Z coordinates.
Thanks to smart memory and the possibility to use a complicated gripper design, the system can localize and pick multiple parts simultaneously. This feature cannot be found in conventional bin picking solutions.
Locator Studio version 1.0.0 is primarily designed for using a vacuum or magnetic gripper as it does not offer collision avoidance and as such cannot prevent collisions of a mechanical gripper with mechanical parts.
Locator Studio works as conventional technologies, which means that it is an upgrade to existing picking solutions, which does not require learning a new programming language. However, it is of great advantage if users have solid knowledge of robotic programming given that a lot of processes run on the robot side.


