Bin Picking Studio 1.9 & Locator Studio 1.2: Advanced Automation with MultiView & Feature Alignment
Occlusions? Symmetry? Too many scanning parameters? Consider those problems solved. We’re talking 3-minute sensor setup, multi-view scanning that sees the unseen, and precision placement of even the trickiest parts. Your bin picking automation game is about to level up.
Test and Iterate Faster with MultiView or Feature Alignment
Discover how the latest updates in Bin Picking Studio 1.9, Locator Studio 1.2, and PhoXi Control 1.13 revolutionize your handling of complex automation tasks. We designed these updates to make your workflows faster, smarter, and more efficient with new tools. Now you can benefit from multi-sensor setups, enhanced object localization, and streamlined sensor calibration.
You’ll find plenty of features that save time and reduce complexity. MultiView Module tackles challenging objects like thin metal sheets by capturing scans from multiple perspectives. Calibration Sharing, on the other hand, eliminates redundant calibration steps, making your workflow a breeze.
Additionally, the Feature Alignment tool ensures precise localization of symmetrical parts with key features that define the correct orientation.
Reach for top-notch results within minutes. PhoXi Control 1.13 introduces the Settings Assistant, making sensor setup simple, as it automatically adjusts for light and material conditions.
Read on to discover how our latest updates optimize your automation processes and bring the highest accuracy and speed to your production environment.
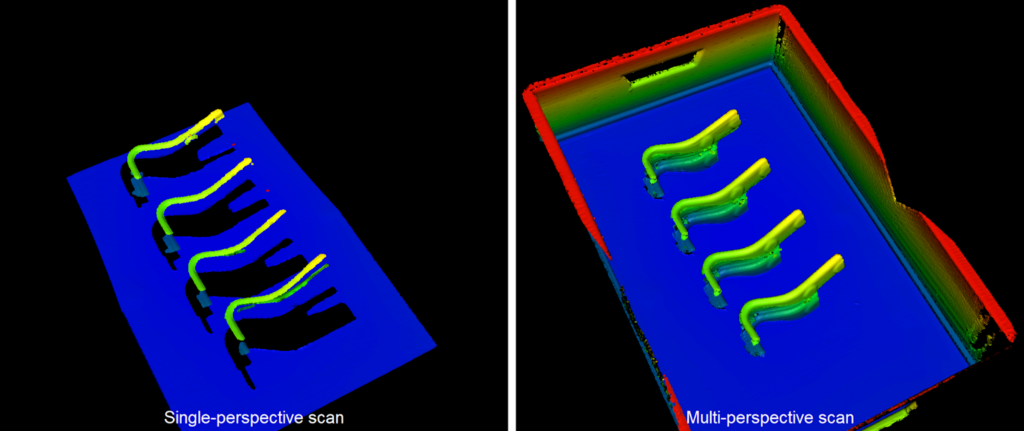
See the Occluded Objects with the MultiView Module
In Bin Picking applications, one of the most persistent problems arises from achieving accurate and robust localization. Especially thin, reflective, irregularly shaped objects placed in bins with multiple compartments pose significant challenges since traditional single-perspective scanning struggles to capture all the necessary details. Results? Missed parts, incorrect grasp points, or extended cycle times. For example, thin metal sheets or self-occluding objects like L- or C-shaped parts can be particularly tricky, as certain features remain hidden from a single viewpoint.
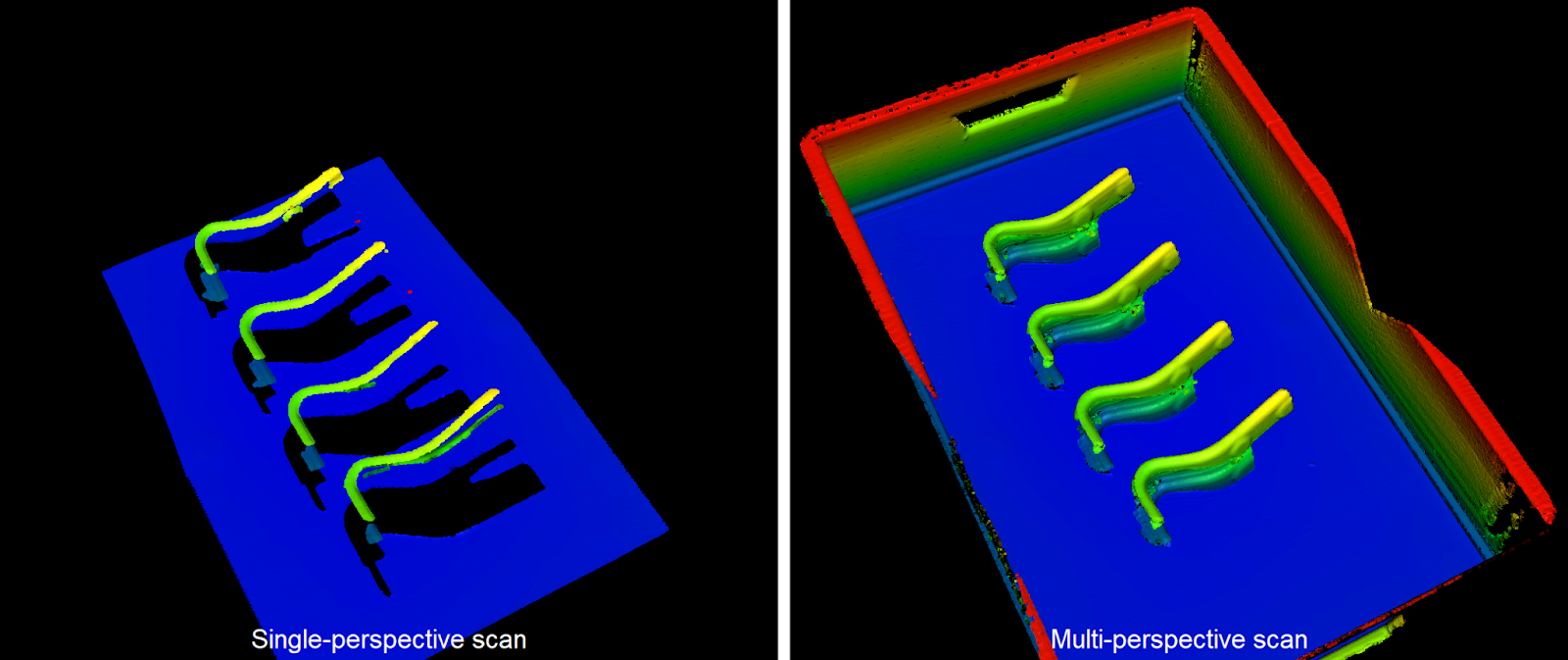
The MultiView Module solves these issues by combining multiple scan perspectives, which significantly improves object visibility and reduces occlusions. This is critical when working with complex geometries or highly reflective surfaces, ensuring that parts can be recognized and reliably picked.
Why is it a game-changer?
- Complex Shapes and Challenging Materials: Ideal for thin, C, or L-shaped metal sheets, bins with compartments, and thin or highly reflective objects that are difficult to capture from a single perspective.
- Essential Feature Visibility: Ensures precise localization by revealing the essential model features that might be obscured in a single view.
- Self-Occluding Objects: Overcomes the challenges posed by self-occluding objects.
- Large Objects: Handles large objects that would not fit the FOV of a single scan.
- Higher Detail Quality: Achieved by using a sensor with lower point-to-point distance and scanning volume – capturing the scene multiple times.
MultiView scenarios:
- Multiple static sensors
One primary sensor is calibrated with the robot, while secondary sensors are calibrated relative to the primary sensor. Scanning is triggered sequentially from each sensor.
- Hand-eye
This approach uses a Photoneo 3D sensor mounted on the robotic arm. This allows for virtually unlimited scans from various viewpoints instead of just a single scan.

This module integrates seamlessly into existing CAD-based workflows, providing a flexible and robust solution for complex automation tasks.
Overcoming Symmetry Challenges with Feature Alignment
In applications requiring precise part orientation, it’s often difficult to handle objects that appear symmetrical but have subtle features defining their correct alignment. This problem gets especially severe when these features are statistically insignificant yet crucial for accurate placement.
With Feature Alignment, the focus shifts to prioritizing the specific areas of interest. By defining axes of symmetry, the engine can quickly identify the correct orientation, minimizing the need for regripping or time-consuming adjustments. This leads to faster cycle times and greater accuracy in placing parts.
Key Benefits:
- Efficient Orientation: Rapidly find the correct alignment of objects, even when the distinguishing features are small.
- Reduced Regripping: Streamline the process and save time by minimizing unnecessary handling or repositioning.
- Enhanced Accuracy: Ensure the highest overlap in the key feature region, guaranteeing precision where it matters most.
This feature is available exclusively for CAD-based solutions, making it ideal for workflows that demand both accuracy and speed.

Calibration sharing & reusing scans
When working with multiple objects, bins, or varying grasping methods, it’s common to use multiple vision systems. Traditionally, this meant calibrating each system individually, even if they shared the same sensor and calibration parameters—adding complexity and time to the process.
The new Calibration Sharing feature simplifies this by allowing a single recalibration for all vision systems, ensuring consistent performance across different setups without the need to recalibrate each one separately.
Additionally, in certaAdditionally, in certain applications, acquiring separate scans for each vision system is no longer necessary. Previously, each system had to perform its own scan during runtime. Now, localization can begin using the most recent scan from the shared sensor. This drastically reduces cycle times, improving overall efficiency.
Key Benefits:
- Simplified Calibration: Streamline setup by recalibrating all systems together with shared sensors.
- Improved Efficiency: Maintain accuracy and consistency without the overhead of multiple calibrations or scans.
- Faster Cycle Times: Reuse the latest scans across multiple systems, cutting down on redundant scanning operations.
This feature optimizes workflows for those handling complex setups, ensuring both time savings and smoother operations.
Simulated Calibration for Flexible Testing
There are times when the robot or sensor isn’t available, yet testing the bin picking application still needs to move forward. The Simulated Calibration feature makes this possible by allowing users to mimic the results of a real robot camera calibration without needing the physical equipment on hand.
With this feature, the sensor can be virtually repositioned within the environment to simulate the desired pose. Whether using a real sensor or pre-saved scans, the simulation mode allows for bin picking trials and testing, providing valuable insights before full deployment.
Key Benefits:
- Test Without Hardware: Continue developing and testing even when the robot or sensor isn’t physically available.
- Flexible Sensor Positioning: Freely adjust sensor positioning in the virtual environment to replicate real calibration outcomes.
- Seamless Simulation: Perform bin picking simulations using either real sensors or pre-saved scans, ensuring a smoother transition to real-world application.
This feature is designed specifically for bin picking solutions, offering flexibility during development and deployment.

Simplified Sensor Connections with Full Ethernet Port Utilization
Previously, connecting multiple sensors to a single vision controller required a network switch, adding unnecessary complexity, cost, and hardware.
Now, with the latest update, all Ethernet ports on the vision controller are fully enabled, allowing up to four sensors to be connected directly. This eliminates the need for a network switch, streamlining the setup and reducing hardware costs.

Set up your 3D Sensor in 3 minutes with Settings Assistant
In addition to the enhancements in Bin Picking and Locator Studio, the setup of any of your Photoneo 3D Sensors now takes just three minutes. New Settings Assistant will identify the best scanning parameters for your application even without expert knowledge.

The tool available in the latest PhoXi Control release further enhances the plug-and-play experience. Discover ideal scanning parameters in minutes and deploy systems with improved performance swiftly and easily.
Simple Steps to Optimal Scanning
You can find the most suitable scanning parameters with ease. The Settings Assistant takes your currently selected profile and guides you through the optimization steps.
How it works? The sensor adjusts to light conditions and object material. Then it fine-tunes the view for completeness and noise reduction, providing you with a finalized custom profile. Whether you’re looking for completeness, fine details, or the shortest cycle time, this approach is your quickest path to excellent results.
| Before | After |
 |  |
The interface suits users of all experience levels. It makes scanning easier and more efficient for both end customers and integrators.
You can read more about the Settings Assistant or other Photoneo 3D Sensors improvements.
And there’s much more…
- Expanded Robotic Brand Support
We’re excited to welcome Kassow Robots, Hyundai Robotics, Mitsubishi, and RobCo to our family of supported robotic brands.
Robot manipulators by Kassow Robots and Hyundai Robotics are ready to be used with the Locator Studio. Mitsubishi and RobCo robots are also available for use with the Bin Picking Studio. - Extended Fixed plane offset functionality
Fixed plane can now be defined perpendicular to any base robot axis (X, Y, Z).
Note: Available for bin-picking-based solutions only. - The studio navigation bar and solution wizard now have a fixed floating position
Navigation elements are always visible, even when you scroll down the page, making it easier to navigate the Studio. - New Picking priority method: Gripping point priority
Objects in the pipeline can now be sorted based on their gripping point priority. This affects the order in which their trajectories are computed and which object is selected for picking.
Note: Available for bin-picking-based solutions only. - Bounding box visualization around AI-localized objects
Apart from the selected gripping point, the 3D visualizer now also displays a bounding box of the localized object based on its detected dimensions.
Note: Available for AI-based solutions only. - Change scene state request added to Deployment action request toolbar
Users can now easily switch between different scene setups right from the web interface during the simulation.
Note: Available for bin picking-based solutions only. - General GUI improvements and bug fixes.
Explore Photoneo’s Complete Product Portfolio, Patented Technologies, and Proven Case Studies – All in One Download:


